LED_ON LED_OFF
+ -


#include <Adafruit_GFX.h>
#include <Adafruit_PCD8544.h>
// pin 3 - Serial clock out (SCLK) 3
// pin 4 - Serial data out (DIN) 4
// pin 5 - Data/Command select (D/C) 5
// pin 7 - LCD chip select (CS) 7
// pin 6 - LCD reset (RST) 6
/*
HC-SR04 VCC -> ARDU 5V
HC-SR04 TRIG-> ARDU 11
HC-SR04 ECHO-> ARDU 12
HC-SR04 GND -> ARDU GND
*/
#include <Ultrasonic.h>
Ultrasonic ultrasonic(11,12);
Adafruit_PCD8544 display = Adafruit_PCD8544(3, 4, 5, 7, 6);
int i=0;
int dist,inv=0;
boolean stan=0;
void setup() {
display.begin();
display.setContrast(60);
display.clearDisplay();
}
void loop() {
distance();
//sweep loops
for(i=0;i<=84;i=i+2){
if(i>0){
display.clearDisplay();
display.drawLine(i-2,0,42,47,WHITE);
display.drawLine(i,0,42,47,BLACK);
grid();
distance();
} else {
display.clearDisplay();
display.drawLine(i,0,42,47,BLACK);
grid();
distance();
}
display.display();
delay(50);
}
for(i=84;i>=0;i=i-2){
if(i>=84){
display.clearDisplay();
display.drawLine(i,0,42,47,BLACK);
grid();
distance();
display.display();
delay(50);
} else {
display.clearDisplay();
display.drawLine(i+2,0,42,47,WHITE);
display.drawLine(i,0,42,47,BLACK);
grid();
distance();
display.display();
delay(50);
}
}
distance();
}
void distance(){
grid();
display.setCursor(66,33);
dist=ultrasonic.Ranging(CM);
display.println(dist);
if (dist<=5){
display.setCursor(54,41);
display.println("ALERT");
}
}
void grid(){
//function body
display.drawLine(0,0,42,47,BLACK);
display.drawLine (84,0,42,47,BLACK);
display.drawCircle(42,47,5,BLACK);
display.drawCircle(42,47,15,BLACK);
display.drawCircle(42,47,25,BLACK);
display.drawCircle(42,47,35,BLACK);
display.drawCircle(42,47,45,BLACK);
display.drawCircle(42,47,55,BLACK);
display.fillTriangle(0,1,41,47,0,47,WHITE);
display.fillTriangle(84,1,43,47,84,47,WHITE);
display.drawLine(0,7,0,47,BLACK);
display.drawLine(42,0,42,47,BLACK);
display.drawLine(0,47,3,47,BLACK);
display.drawLine(0,42,1,42,BLACK);
display.drawLine(0,37,3,37,BLACK);
display.drawLine(0,32,1,32,BLACK);
display.drawLine(0,27,3,27,BLACK);
display.drawLine(0,22,1,22,BLACK);
display.drawLine(0,17,3,17,BLACK);
display.drawLine(0,12,1,12,BLACK);
display.drawLine(0,7,3,7,BLACK);
display.fillCircle(42,(48-dist),2,BLACK);
}




.jpg)




La primera entrada de este blog fue una primera ejecución del motor shield y el smart car funcionado sin arduino.
Hoy avanzamos un poquito. Colocado arduino y el shield sobre el coche con gomas y un sensor de distancia. El sensor va sobre los pines del shield destinado a los servos que corresponden al 9 y10 digital.
Teóricamente debería girar sólo si encuentra un obstáculo. Cuándo está conectado a pc si funciona adecuadamente, por lo que puede ser por ruido al compartir la alimentación o por tener poco voltaje al ser 4 pilas recargables.

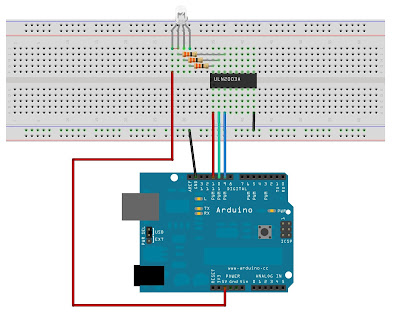
/*
* RGB Rainbow
* Ejemplo de como hacer un led 'Rainbow' con un led RGB de
* ánodo común Se utilizan tres salidas con la instrucción
* 'analogWrite' que produce una salida PWM para controlar
* el brillo de cada led.
*/
// Retardo que determina la velocidad de la transicion entre
// colores
#define RETARDO 10
#define MAXBRILLO 50
// Salidas para cada color (tiene que permitir PWM).
int rojo = 6 ;
int verde = 5;
int azul = 3;
/*
* Funcion para variar el valor de PWM
* Para dir =1 aumenta para dir = -1 disminuye
*/
void fade(int pin, int dir)
{
if ( dir != 1 )
{
for (int i = MAXBRILLO; i >= 0; i--)
{
analogWrite(pin, i);
delay(RETARDO);
}
}
else
{
for (int i = 0; i <= MAXBRILLO; i++)
{
analogWrite(pin, i);
delay(RETARDO);
}
}
}
/*
* Ponemos los pines como salidas , y
*/
void setup()
{
pinMode(rojo, OUTPUT);
pinMode(verde, OUTPUT);
pinMode(azul, OUTPUT);
//Partimos del amarillo
analogWrite(rojo, MAXBRILLO);
analogWrite(verde, MAXBRILLO);
analogWrite(azul, 0);
}
/*
* Vamos cambiando los tres colores de modo que se produce
* Un paso por todos los colores RGB y sus mezclas 2 a 2
*/
void loop()
{
fade(verde,-1); // amarillo -> rojo
fade(azul,1); // rojo -> violeta
fade(rojo,-1); // violeta -> azul
fade(verde,1); // azul -> cian
fade(azul,-1); // cian -> verde
fade(rojo,1); // verde -> amarillo
}
int n =10; //Número de leds
int t=100; //Retardo
int m=5;//la mitad de 10 :)
void style_1(int a) //cuantas veces queremos que se repita el estilo 1
{
int j,i;
for(i=1;i<=a;i++){
for(j=1;j<=n;j++)
{
digitalWrite(j,HIGH);
delay(t);
}
for(j=n;j>=1;j--)
{
digitalWrite(j,LOW);
delay(t);
}
}
}
void flash(int a)//cuantas veces que haga flash
{
unsigned char j,k;
for(k=0;k<=a;k++)
{
for(j=1;j<=n;j++)
digitalWrite(j,HIGH);
delay(t);
for(j=1;j<=n;j++)
digitalWrite(j,LOW);
delay(t);
}
}
void style_2(void) // a este no le he puesto número de repeticiones
{
unsigned char j,k;
k=1;
for(j=m;j>=1;j--)
{
digitalWrite(j,HIGH);
digitalWrite(j+k,HIGH);
delay(2*t);
k +=2;
}
k=9;
for(j=1;j<=m;j++)
{
digitalWrite(j,LOW);
digitalWrite(j+k,LOW);
delay(2*t);
k -=2;
}
}
void style_3(void)// a este no le he puesto número de repeticiones
{
unsigned char j,k;
k=9;
for(j=1;j<=m;j++)
{
digitalWrite(j,HIGH);
digitalWrite(j+k,HIGH);
delay(2*t);
digitalWrite(j,LOW);
digitalWrite(j+k,LOW);
k -=2;
}
k=5;
for(j=2;j>=1;j--)
{
digitalWrite(j,HIGH);
digitalWrite(j+k,HIGH);
delay(2*t);
digitalWrite(j,LOW);
digitalWrite(j+k,LOW);
k +=2;
}
}
void setup()
{
unsigned char i;
for(i=1;i<=n;i++)
pinMode(i,OUTPUT);
}
void loop()
{
style_1(2);
flash(1);
style_2();
flash(2);
style_3();
flash(3);
style_2();
flash(4);
style_1(2);
flash(5);
}