Perdonad lo parco de las explicaciones y que no ponga muchas imágenes, espero que la información compense :)
Tengo un amigo que quiere hacer un coche siguelineas, pero ya puestos va a comprar todo el aparataje por si le dá por experimentar. Como he hecho una lista de lo que había comprado o visto en las tiendas chinas, os la dejo aquí para que sirva de referencia. Algunas de las cosas no están muy relacionadas ,las explico por si alguien no quiere usarlas.
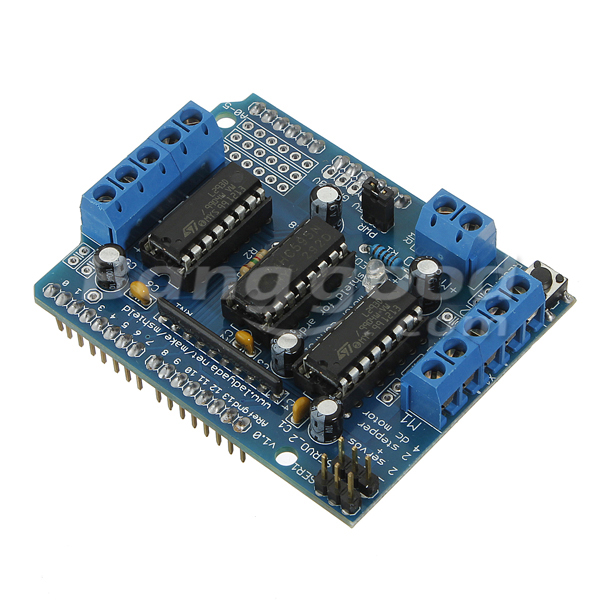
http://www.banggood.com/Motor-Drive-Shield-L293D-For-Arduino-Duemilanove-Mega-Or-UNO-p-72855.html 8,6€
http://www.banggood.com/Keypad-Shield-Blue-Backlight-For-Arduino-Robot-LCD-1602-Board-p-79326.html 3,75€
http://www.banggood.com/Arduino-USB-Host-Shield-Compatible-Google-Android-ADK-Support-UNO-MEGA-p-90129.html 8,27€ (este no lo tengo yo)
http://www.banggood.com/HC-06-Wireless-Bluetooth-Transceiver-RF-Main-Module-Serial-For-Arduino-p-80364.html 5,3€
http://www.banggood.com/Wholesale-CMOS-VGA-OV7670-Camera-Module-Lens-640X480-SCCB-Compatible-W-Or-I2C-Interface-p-51149.html 5,34€
http://www.banggood.com/Wholesale-New-Arduino-ProtoShield-Prototype-Kit-Shield-Prototyping-With-Mini-Breadboard-p-42828.html 3€
http://www.banggood.com/2WD-Smart-Car-Chassis-Tracing-Car-With-Encoder-Battery-Box-For-Arduino-p-906309.html
http://www.banggood.com/MAX7219-Dot-Matrix-Module-DIY-Kit-SCM-Control-Module-For-Arduino-p-72178.html 1,81€
http://www.banggood.com/Wholesale-Arduino-Ultrasonic-Module-HC-SR04-Distance-Measuring-Detector-Transducer-Sensor-p-40313.html 1,79€
http://www.banggood.com/6DOF-MPU-6050-3-Axis-Gyro-With-Accelerometer-Sensor-Module-For-Arduino-p-80862.html 2,75€
http://www.banggood.com/TowerPro-SG90-Mini-Gear-Micro-Servo-9g-For-RC-Airplane-Helicopter-p-86439.html
http://www.buyincoins.com/item/36433.html brujula mangnetica 1,87$
http://dx.com/es/p/5-channel-white-black-cable-tracking-sensor-module-for-arduino-green-157104#.UuZdtf2r2L0 10$
http://www.ebay.com/itm/Specialty-Third-Hand-Soldering-Iron-Stand-Helping-Magnifying-Tool-security-/111063749130?pt=LH_DefaultDomain_0&hash=item19dbea520a 7,37$
Los imprescindibles:
- Motor compatible con adafruit
- Base para el coche robótico de banggood
- Siguelineas de DX , una placa de 5 sensores ya integrados
- Sensor de distancia
- Bluetooth
- servo
Los opcionales:
- Una cámara para detectar colores
- brujula magnetica y acelerometro para mejorar la precisión de los giros
- Helper hand para ayudar en el soldado de piezas
- Dot Matrix, por que es muy chulo :), para ver alguna información de estado de seguimiento de lineas o de obstáculos a simple vista sobre el coche.
- Shield de prototipado, no se puede usar directamente en el coche, porque el shield de motores no lo permite, pero es muy útil para mantener los montajes del arduino y volver a ellos después.









{kind=link}